
Parallel Indexing and Lines of Position - Drawing the line
A prudent navigator always remains aware and in control of own ship’s position and motion. As a good practice, never rely on just one means of position fixing or verification. Capt Zakirul Bhuiyan FNI and Captain Jaikar Sohal AFNI from Warsash Maritime School explore some of the tools at your disposal
For decades, navigating officers have been employing techniques such as Parallel Indexing (PI) and position fixing using Lines of Position (LoPs) for monitoring the ship’s position with respect to its planned track. Advances in electronic navigation, especially the introduction of ECDIS, have made these techniques even more significant.
Without a doubt, ECDIS has enhanced navigators’ situational awareness by keeping them aware of the vessel’s real-time position in relation to the surrounding navigational dangers. However, the performance of ECDIS is largely dependent on the performance and accuracy of the mandatory sensors measuring heading, position and speed. There have been many incidents in the recent past that highlight the vulnerability of sensors such as the Global Navigation Satellite System (GNSS). The use of navigation techniques like PI and LoPs, which can be set up as layers on an Integrated Navigation System (INS), helps to build navigational resilience and improves situational awareness.
The power of Parallel Indexing
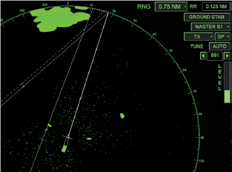
Parallel Indexing is a very useful technique that allows the watchkeeper to react almost instantly to any deviation from the planned track and to constantly monitor whether the vessel is ‘right of the track’, ‘left of the track’ or ‘on track’. PI relies on the fact that the relative track of a fixed object is the reciprocal (i.e. exact reverse) of the vessel’s ground track.
During the passage planning stage, certain fixed charted objects are chosen as indexing targets or references. They must be good radar targets, clearly visible on display at the appropriate ranges. As the vessel proceeds along its track, the PI moves with it, maintaining its position on the target. Should the vessel move off its track, the PI will also move away from the reference target. This deviation is readily noticeable. It prompts the operator to make timely adjustments to the heading to bring the vessel back on track and the PI back to the correct reference target.

Use of index lines for position monitoring and course alteration
The PI technique offers many advantages:
Position monitoring on track:
It provides real-time monitoring of the vessel’s position. Other methods like position fixing give the history of the vessel’s positions. PI lines can also be used as the clearing bearings to keep the ship in safe waters
Course alteration:
The use of wheel-over PIs can help to execute large alterations effectively
Collision risk assessment:
A PI line aligned with a number of successive plots of the target can provide an indication of the risk of collision. This is especially useful on radars without ARPA
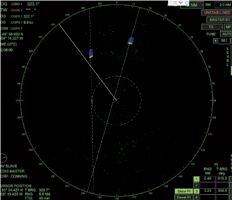
Using index lines with VRM for marking relative track of targets for determining closest point of approach
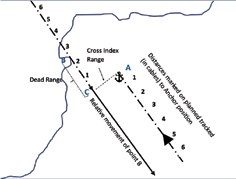
Anchoring: A PI line can be used along with a Variable Range Marker (VRM) adjusted for dead range to anchor a ship in a controlled manner. (See diagram below)
Zero index line: The zero index line, i.e. PI line passing through the centre of the radar’s plan position indicator, can be used as a marking line for steering, or as a transit line to take transit observation of any object for alteration
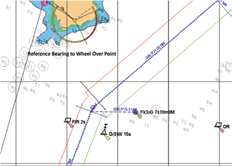
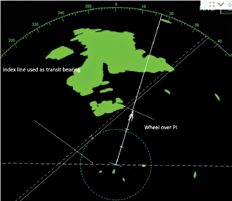

Using zero index line on ECDIS and radar for marking the reference for a wheel-over position for course alteration
The PI technique provides a reliable means of position monitoring in all states of visibility and also in case of failure or errors in input sensors. PIs on ECDIS (rather than the radar) should only be used for route planning and information purposes. When monitoring the route, the prudent mariner will maintain, whenever possible in coastal and estuarial waters, a check on the integrity of the displayed position of their ship. When the source of the displayed position is own ship’s (D)GNSS, there is always a possibility that the position displayed may not coincide with the ship’s actual position. This can be checked quite easily by observing PIs on the radar display to monitor them by comparison with the planned track, comparing overlays on the ARPA and radar and monitoring the echo sounder where appropriate.
The lowdown on Lines of Position
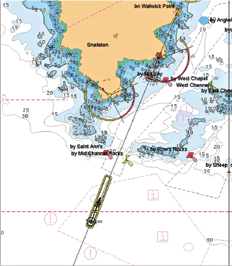
A Line of Position is a line of observation where the ship position is expected to be located anywhere along that the line. On its own, a single LoP cannot provide a position fix, as the ship can be located at any point along the line. Navigators require at least two LoPs to plot a ship’s position and should use a third LoP to verify the plotted position.
Traditionally, navigators have used visual, radar and celestial LoPs to fix their ship’s positions on paper charts. However, position fixing using LoPs has not lost its significance with the introduction of ECDIS, and manual position fixing has been a mandatory ECDIS function since 2009. The principle of using LoPs to fix ship position on ECDIS remains the same as on the paper chart, but with some added advantages:
- Manual position fixing on ECDIS is time dependent, and involves the application of running fix on LoPs, thus improving the accuracy
- Manual position fixing using LoPs provides a very reliable verification tool to crosscheck the accuracy of GNSS position.
If the position sensor (GNSS) fails or develops a substantial error, the navigator is required to use Dead-Reckoning (DR) or Estimated Position (EP) as position input to ECDIS. Regular manual position fixing using LoPs improves the accuracy of both DR or EP methods as the positions are corrected with each fix. Some systems may require several steps to plot fixes to use with DR/EP mode, so it is important to be familiar with the process on the system on your own ship.